Home > Press > ETH Zurich researchers copy bacteria
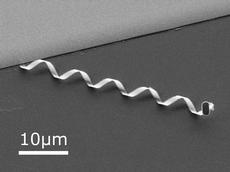 |
| Artificial bacterial flagella are about half as long as the thickness of a human hair. They can swim at a speed of up to one body length per second. This means that they already resemble their natural role models very closely. (Image: Institute of Robotics and Intelligent Systems/ETH Zurich) |
Abstract:
For the first time, ETH Zurich researchers have built micro-robots as small as bacteria. Their purpose is to help cure human beings.
ETH Zurich researchers copy bacteria
Zurich, Switzerland | Posted on April 15th, 2009 They look like spirals with tiny heads, and screw through the liquid like miniature corkscrews. When moving, they resemble rather ungainly bacteria with long whip-like tails. They can only be observed under a microscope because, at a total length of 25 to 60 �m, they are almost as small as natural flagellated bacteria. Most are between 5 and 15 �m long, a few are more than 20 �m.
Mimicking nature
The tiny spiral-shaped, nature-mimicking lookalikes of E. coli and similar bacteria. are called "Artificial Bacterial Flagella" (ABFs), the "flagella" referring to their whip-like tails. They were invented, manufactured and enabled to swim in a controllable way by researchers in the group led by Bradley Nelson, Professor at the Institute of Robotics and Intelligent Systems at ETH Zurich. In contrast to their natural role model, some of which cause diseases, the ABFs are intended to help cure diseases in the future.
The practical realization of these artificial bacteria, the smallest yet created, with a rigid flagellum and external actuation, was made possible mainly by the self-scrolling technique from which the spiral-shaped ABFs are constructed. ABFs are fabricated by vapor-depositing several ultra-thin layers of the elements indium, gallium, arsenic and chromium onto a substrate in a particular sequence. They are then patterned from it by means of lithography and etching. This forms super-thin, very long narrow ribbons that curl themselves into a spiral shape as soon as they are detached from the substrate, because of the unequal molecular lattice structures of the various layers. Depending on the deposited layer thickness and composition, a spiral is formed with different sizes which can be precisely defined by the researchers. Nelson says, "We can specify not only how small the spiral is, but even the scrolling direction of the ribbon that forms the spiral."
External propulsion via magnetic field
Even before releasing the ribbon that will afterwards form the artificial flagellum, a kind of head for the mini-robot is attached to one of its ends. It consists of a chromium-nickel-gold tri-layer film, also vapor-deposited. Nickel is soft-magnetic, in contrast to the other materials used, which are non-magnetic. Nelson explains that, "This tiny magnetic head enables the ABF to move in a specific way in a magnetic field." The spiral-shaped ABF swim through the liquid and its movements can be observed and recorded under a microscope.
With the software developed by the group, the ABF can be steered to a specific target by tuning the strength and direction of the rotating magnetic field which is generated by several coils. The ABFs can move forwards and backwards, upwards and downwards, and can also rotate in all directions. Brad Nelson says "There's a lot of physics and mathematics behind the software." The ABFs do not need energy of their own to swim, nor do they have any moving parts. The only decisive thing is the magnetic field, towards which the tiny head constantly tries to orientate itself and in whose direction it moves. The ABFs currently swim at a speed of up to 20 �m, i.e. up to one body length, per second. Nelson expects that it will be possible to increase the speed to more than 100 �m per second. For comparison: E. coli swims at 30 �m per second.
Possible applications in medicine
The ABFs have been designed for biomedical applications. For example, they could carry medicines to predetermined targets in the body, remove plaque deposits in the arteries or help biologists to modify cellular structures that are too small for direct manipulation by researchers. In initial experiments, the ETH Zurich researchers have already made the ABFs carry around polystyrene micro-spheres.
At the moment, however, the group is still carrying out basic research. Further investigations will be needed before there can be any practical applications. Nelson explains that, "For applications in the human body, it would first of all be necessary to steer the ABFs precisely, track their route without optical monitoring and guarantee their localization at all times." If ABFs are to deliver drugs, they would first of all have to be functionalized in a fe
####
For more information, please click here
Contacts:
ETH Zurich
Editorial Office
HG F 41
Raemistrasse 101
8092 Zurich
SWITZERLAND
Fax +41 44 632 17 16
Copyright © ETH Zurich
If you have a comment, please Contact us.Issuers of news releases, not 7th Wave, Inc. or Nanotechnology Now, are solely responsible for the accuracy of the content.
Bookmark:









| Related News Press |
News and information
![]() Quantum computer improves AI predictions April 17th, 2026
Quantum computer improves AI predictions April 17th, 2026
![]() Flexible sensor gains sensitivity under pressure April 17th, 2026
Flexible sensor gains sensitivity under pressure April 17th, 2026
![]() A reusable chip for particulate matter sensing April 17th, 2026
A reusable chip for particulate matter sensing April 17th, 2026
![]() Detecting vibrational quantum beating in the predissociation dynamics of SF6 using time-resolved photoelectron spectroscopy April 17th, 2026
Detecting vibrational quantum beating in the predissociation dynamics of SF6 using time-resolved photoelectron spectroscopy April 17th, 2026
Molecular Machines
![]() First electric nanomotor made from DNA material: Synthetic rotary motors at the nanoscale perform mechanical work July 22nd, 2022
First electric nanomotor made from DNA material: Synthetic rotary motors at the nanoscale perform mechanical work July 22nd, 2022
![]() Nanotech scientists create world's smallest origami bird March 17th, 2021
Nanotech scientists create world's smallest origami bird March 17th, 2021
![]() Giant nanomachine aids the immune system: Theoretical chemistry August 28th, 2020
Giant nanomachine aids the immune system: Theoretical chemistry August 28th, 2020
Nanomedicine
![]() A fundamentally new therapeutic approach to cystic fibrosis: Nanobody repairs cellular defect April 17th, 2026
A fundamentally new therapeutic approach to cystic fibrosis: Nanobody repairs cellular defect April 17th, 2026
![]() New molecular technology targets tumors and simultaneously silences two �undruggable� cancer genes August 8th, 2025
New molecular technology targets tumors and simultaneously silences two �undruggable� cancer genes August 8th, 2025
![]() New imaging approach transforms study of bacterial biofilms August 8th, 2025
New imaging approach transforms study of bacterial biofilms August 8th, 2025
![]() Electrifying results shed light on graphene foam as a potential material for lab grown cartilage June 6th, 2025
Electrifying results shed light on graphene foam as a potential material for lab grown cartilage June 6th, 2025
Discoveries
![]() Quantum computer improves AI predictions April 17th, 2026
Quantum computer improves AI predictions April 17th, 2026
![]() Flexible sensor gains sensitivity under pressure April 17th, 2026
Flexible sensor gains sensitivity under pressure April 17th, 2026
![]() A reusable chip for particulate matter sensing April 17th, 2026
A reusable chip for particulate matter sensing April 17th, 2026
![]() Detecting vibrational quantum beating in the predissociation dynamics of SF6 using time-resolved photoelectron spectroscopy April 17th, 2026
Detecting vibrational quantum beating in the predissociation dynamics of SF6 using time-resolved photoelectron spectroscopy April 17th, 2026
Announcements
![]() A fundamentally new therapeutic approach to cystic fibrosis: Nanobody repairs cellular defect April 17th, 2026
A fundamentally new therapeutic approach to cystic fibrosis: Nanobody repairs cellular defect April 17th, 2026
![]() UC Irvine physicists discover method to reverse �quantum scrambling� : The work addresses the problem of information loss in quantum computing system April 17th, 2026
UC Irvine physicists discover method to reverse �quantum scrambling� : The work addresses the problem of information loss in quantum computing system April 17th, 2026
|
|
||
|
|
||
| The latest news from around the world, FREE | ||
|
|
||
|
|
||
| Premium Products | ||
|
|
||
|
Only the news you want to read!
Learn More |
||
|
|
||
|
Full-service, expert consulting
Learn More |
||
|
|
||